Основные законы регулирования. П & И - регуляторы
Задача системы регулирования – преобразовать возмущение в регулирующее воздействие.
То есть мы можем записать, что: y(t)=K·x(t)
Вот этот коэффициент К – это коэффициент, который может быть просто числом, а может быть выражением. Поэтому говорят, что К – это не коэффициент, а оператор и обозначают его W(t). Мало того, этому оператору присвоено имя передаточная функция.
Изобразим: ![]()
где, Wоб(t) – передаточная функция самого объекта управления, Wр(t) – передаточная функция регулятора.
Существуют понятия линейная система или нелинейная, непрерывная или дискретная. В большинстве случаев у нас системы нелинейные, т.е. W≠K, и цифровые, т.е. дискретные.
Регуляторы бывают разные:
П-регулятор: Данный регулятор представляет собой регулятор, работающий по следующей формуле:
М=Кр(Хзад.—Хизм.)
М – это воздействие регулятора на объект, целью которого является компенсация изменения регулируемой величины, возникающей из-за нанесения возмущения (Хзад - Хизм), перед тем, как нанести управляющее воздействие.
Схема работы такого регулятора:
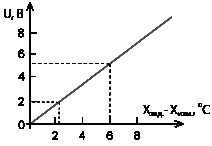
Таким образом, видно, что для того, чтобы скомпенсировать ∆Х=6°С, необходимо переместить регулирующий орган в положение 5 В выходного сигнала.
Вычислим Кр:
Кр=5/6
Формула П-регулятора при этом будет:
M(t)=(5/6)·(Хзад.- Хизм.)(t)
Таким образом, можно приблизительно определить Кр пропорционального регулятора.
Достоинство данного регулятора – скорость.
Недостатки: ошибка (очень важный параметр) после окончания регулирования – статическая ошибка. Она возникает из-за того, что П-регулятор дает команду только тогда, когда M(t2)-M(t1)≠0, т.е. если после нанесения регулирования M(t2)=M(t1), то регулятор больше пересчитываться не будет. Физически это происходит из-за неидеальности исполнительных механизмов, каналов измерения, а также инерционности объектов, которую П-регулятор учесть не может.
И-регулятор: Данный регулятор учитывает все те проблемы, которые возникли при П-регулировании.
Если мы проинтегрируем во времени (сложим) все (Хзад.-Хизм.) и пропорционально ∫(Хзад.-Хизм.)dt выдадим управляющее воздействие, то такая система успокоится только тогда, когда не от чего будет брать ∫, то есть тогда, когда Хзад.-Хизм.= 0. В этом случае будут учитываться и люфты, и погрешности измерений, а также и инерционность объектов.
Однако, обратим внимание на формулу И-регулятора: 
где, Ки – коэффициент пропорциональности интегрирующей составляющей.
Обычно рассматривают величину, обратно-пропорциональную Ки, Ти=1/Ки – постоянная времени интегрирования.
Так вот ∫ изменяется очень медленно, по мере накопления ошибки регулирования, то есть данный регулятор имеет существенный недостаток – это медленная скорость приведения регулируемого параметра к заданному значению.
Недостатки П и И регуляторов компенсируются путем соединения их в один ПИ-регулятор.
Совместим формулу П-регулятора с формулой И-регулятора: ![]()
Данный ПИ-регулятор работает следующим образом: при возникновении сигнала рассогласования (Хзад.- Хизм.≠0) сразу вступает в работу П-составляющая и происходит перемещение исполнительного механизма пропорционально Кр(Хзад.- Хизм.). После этого вступает в работу И-составляющая, которая перемещает исполнительный механизм по закону (1/Ти )·∫(Хзад.- Хизм.)dt до тех пор, пока Хзад. не сравняется с Хизм..
Например: если t воды в чайнике изменилась от заданной t на 20°С, то П-составляющая подвинет ручку конфорки на 18°С, а И-составляющая уберет оставшихся 2°С разницы.
В настоящее время большинство инженерных систем управляются ПИ-регулятором.
Литература:
1. В. А. БЕСЕКЕРСКИЙ, А. Н. ГЕРАСИМОВ, Л. Ф. ПОРФИРЬЕВ, Е. А. ФАБРИКАНТ, С. М. ФЕДОРОВ, В. И. ЦВЕТКОВ. Сборник задач по теории автоматического регулирования и управления
2. Айзерман М. А. Лекции по ТАУ. Гостехиздат, 1966г.
3. Иващенко Н. Н. Автоматическое регулирование. Машгиз.1958г.
4. 8. Школа автоматчиков. УРОК №5. Основы автоматизации
4. Автоматизация производства и промышленная электроника. Энциклопедия. Под ред. А. И. Берга. и В. А. Трапезника. М.1962-1965г